ASTRA - Advanced Space Technologies for Robotics & Astrodynamics
ASTRA - Advanced Space Technologies for Robotics & Astrodynamics
ONGOING ACTIVITIES
- Rapid multidisciplinary design of distributed architectures in Keplerian regimes: the research topic encompasses the design, analysis and optimization of orbital transfers and periodic motions leveraging multi-body and non-Keplerian dynamics for spacecraft fleets. The research groups develops and maintain various analytical tools for the characterization of the dynamical regime and the exploitation of the unique features of non-Keplerian dynamics; particular attention is on relative natural dynamics on quasi- periodic orbits for rendezvous, formation flying and constellations design. The coupled orbit-attitude motion modelling in non-Keplerian dynamics is a further asset of the research group.
- Heterogeneous constellation design with operational perspective: the research group develops various analytical and numerical design and optimization tools mastering spacecraft constellations in different orbital configurations and planetary regimes. The capabilities in this research area include the settling of both the space and ground segment networks to comply with advanced final users’ requirements. The analysis and design capabilities are applicable to flight dynamics and system studies. The goal of the research area includes both the space segments and the ground segment, including optimal antenna management and ground operations budget and timing. The research area includes the activities on opportunistic re-planning techniques to maximize the heterogeneous EO constellations resources (payloads, access areas, resolutions) exploitation for on-demand timely data collection and fast delivery.
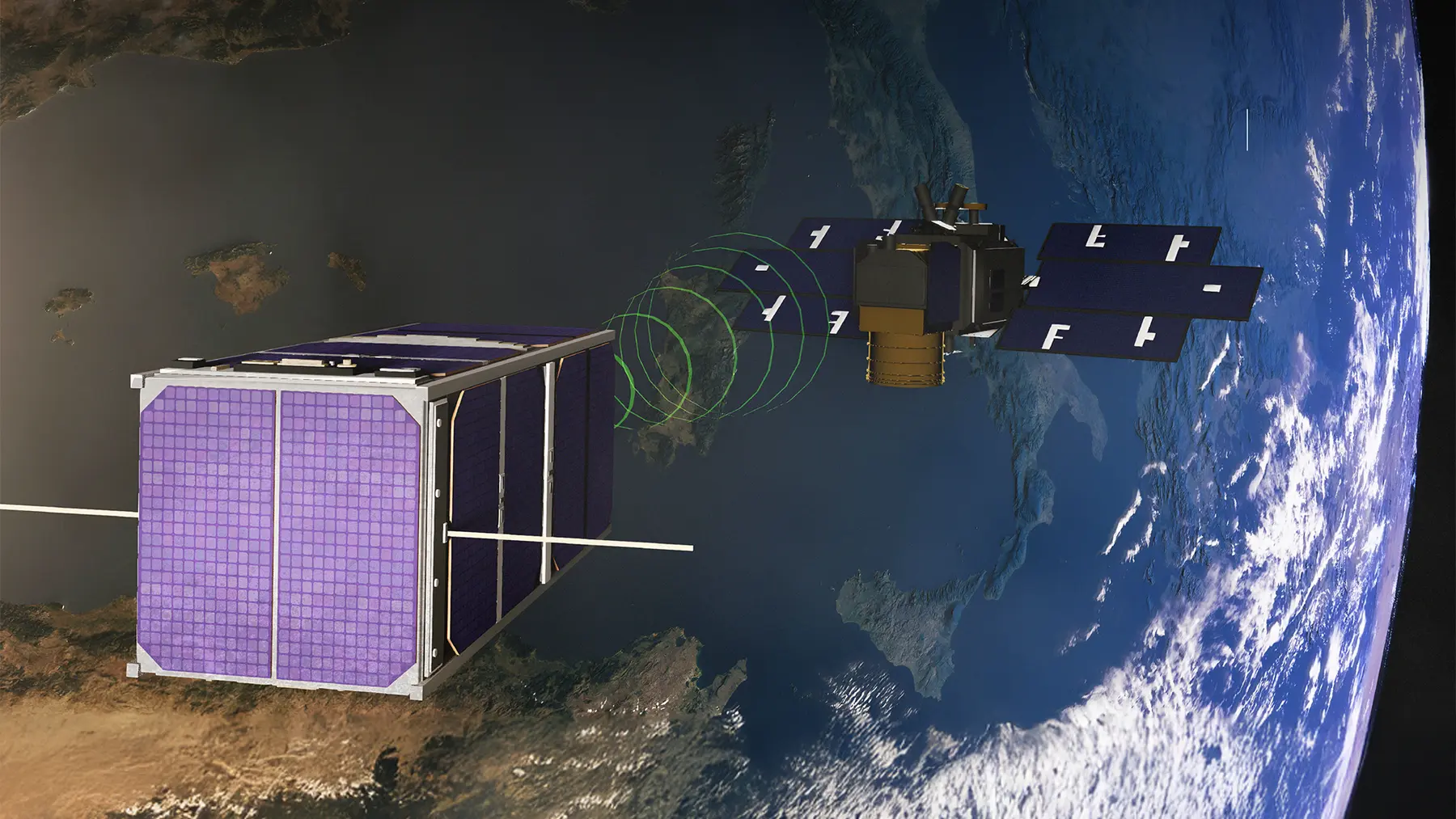
- Distributed system GC in highly perturbed planetary environment: the group explores guidance and control solutions and approaches for distributed systems operating in highly perturbed planetary environments. This includes studying relative dynamical models that incorporate perturbations, such as gravitational anomalies, heavy atmospheric drag, or surface interactions. The focus is also on distributed guidance strategies for multi-agent systems, including fleet concepts, swarming behaviors, and formation flying in space. These efforts aim to enhance coordination, adaptability, robustness and autonomy in challenging environments affected by uncertainties, enabling advanced mission concepts such as multi- satellite formations and very close proximity operations for IOS.
- AI techniques (learning) for proximity guidance and control IP supported: The research topic addresses the inclusion of deep learning techniques to enhance traditional guidance and control algorithms for embedded applications. This entails both the investigation of hybrid methods (neuron-based model predictive control) and end-to-end deep learning approaches such as (meta-) reinforcement learning and inverse reinforcement learning. The research aims to take advantage of offline and online learning to enhance the effectiveness of generated trajectory with respect to the proposed objective, along with a task of continuous online system identification to refine controllers in unknown\fast changing scenarios. In this context, research on neural networks architecture is also performed: from autoregressive models, transformer-based and in general recurrent networks. The research is strongly connected to the activities the team carries on in the field of image processing for proximity navigation.
- AI techniques for proximity navigation: The research area explores AI techniques for proximity navigation, with a primary focus on leveraging image-based methods whenever targets are primarily passive or non-cooperative. This includes employing advanced convolutional neural network (CNN) architectures, such as ResNet, U-Net, for tasks like object detection, semantic segmentation, pose estimation, and single-image depth estimation to aid pose estimation algorithm or SLAM. State-of-the- Art models based on transformers and diffusive models are also investigated, although still computationally heavy for deployment in embedded resources. The scenarios of interest involve navigating in close proximity to artificial satellites and planetary terrain, requiring robust models capable of handling the unique challenges of space environments, such as varying illumination, dynamic perspectives, and limited computational resources. These techniques aim to enhance the autonomy and safety of spacecraft during critical operations like docking, landing, and obstacle avoidance. The area of research includes the generation of calibrated synthetic images databases in VIS and IR domains, for IOS and landing scenarios.
- Multibody dynamics guidance and control in IOS scenarios: the research is strongly connected with those focused on GNC in proximity flight scenarios and deals with investigating most proper guidance and control techniques for IOS chaser equipped with flexible manipulators from unfolding to contact and grasping and chaser-target rigidizing for servicing, through multibody modelling to consider appendages multiple joints, flexibility, sloshing. Within this area reinforcement learning techniques merged with classic robots control are adopted to gain the requested adaptivity and robustness to the target dynamics and inertial uncertainties.
- Pil-HIL settling and development for multispectral IP for near\far relative\absolute navigation and object shaping: this research investigates the exploitation of multispectral images inputs to perform image processing to derive full pose, in relative dynamics scenarios. To support that field of research; the group conducts comprehensive validation activities using a robotic arm and physical mockups or dioramas to simulate target scenarios. This process begins with synthetic renderings, allowing to design and refine models in a controlled virtual environment, and progresses to laboratory image validation for real-world testing. The robotic arm enables precise and repeatable experiments, ensuring our methods are robust and effective for tasks like proximity navigation, object detection, and depth estimation in scenarios involving artificial satellites and planetary terrain. The lab activities include PIL and HIL validation using representative hardware both in terms of onboard computer (e.g. Xilinx Ultrascale+) and EM cameras (e.g. FLIR, Chameleon, Gecko cameras). The synergic integration with classical GNC and ADCS approaches is possible and continuously investigated by our research group. Those VIS-IR IP proximity navigation techniques are foreseen to be validated in flight within the e.Inspector mission to close flyaround a real debris, the team is responsible of.
- ISL-RF based algorithms to support relative NAV, VM\Pil\HIL: under the line of relative dynamics investigation, the group also works on ISL-RF (Inter-Satellite Link - Radio Frequency) based algorithms to support on board relative navigation. This involves developing and validating Virtual Models, Processor- in-the-Loop (PIL), and Hardware-in-the-Loop (HIL) with representative embedded resources (e.g. ZedBoard) setups to simulate and test these algorithms under realistic conditions. These frameworks enable evaluationg system performance and refine the proposed navigation methods in controlled environments before deployment, ensuring their reliability and accuracy in scenarios like inter-satellite positioning and close-proximity operations. Those techniques are expected to be tested on orbit within one of the on going small sat missions the team is responsible of.
- Design of high accuracy attitude s\s (SW\HW): High-accuracy and multi-mode attitude s/s design is an asset of the group applied and tested from model and algorithm design, to autogenerated code production, to SIL testing, up to PIL and HIL testing with relevant spacecraft hardware. The attitude s/s design capabilities include hardware design and electronic integration in platform systems, low-level and component driver software design and optimization, fault management and autonomous reconfiguration, mode management and s/s finite state machine optimization. The testing capabilities are validated with flight hardware in integrated subsystems.
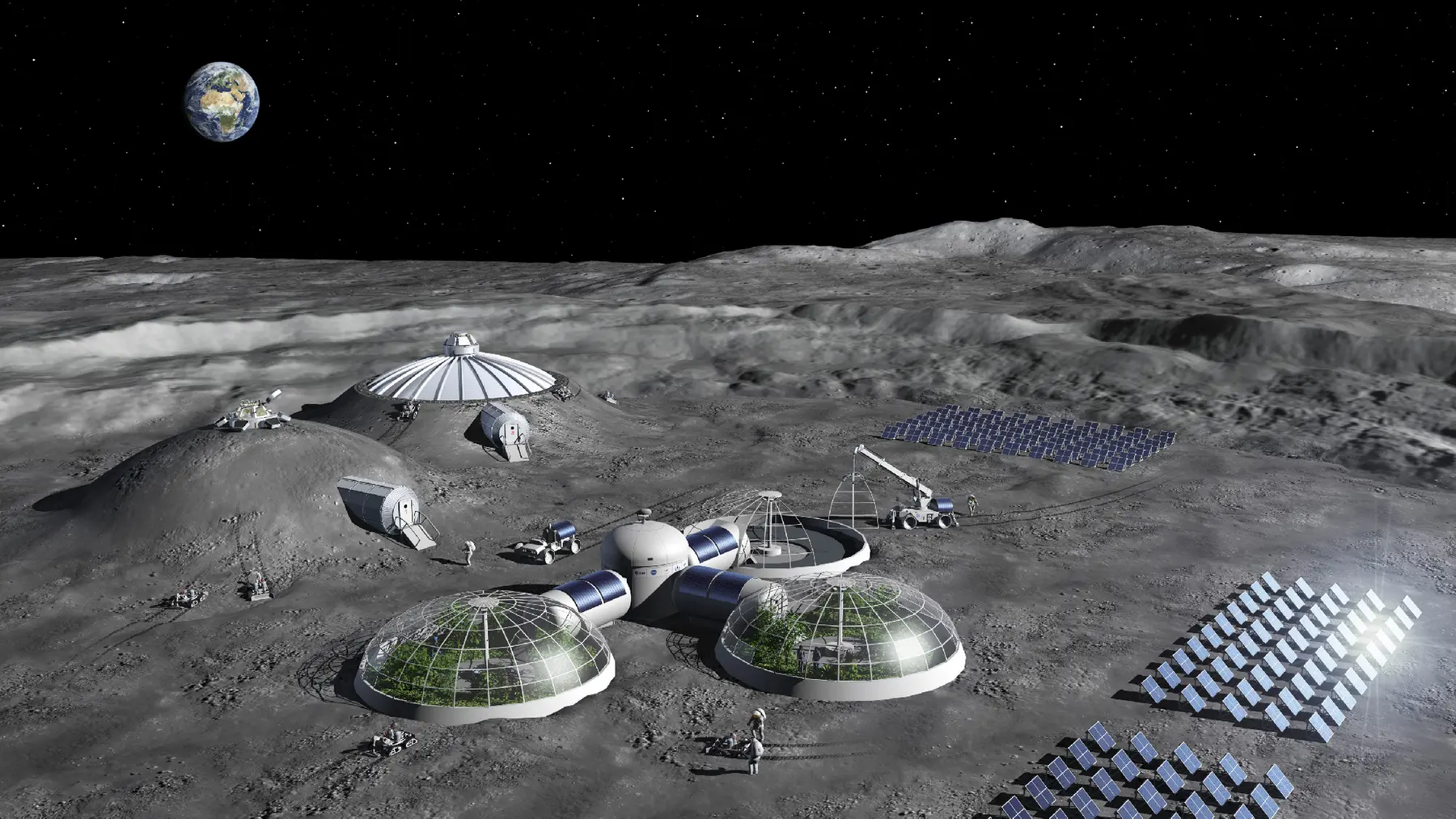
- Planetary soil manipulation: the group performs numerical and experimental research on interaction with planetary soil with attention to non-cohesive materials, regolith like: Discrete elements models (DEM) are adopted to develop a high fidelity tool which allows investigating the granular soil mechanical, thermal, electrical behaviour whenever in contact with artifacts, solid or gaseous; that supports surface exploration tools and vehicles well-suited designs, driven by the soil\artifacts interaction requirements; in particular, locomotion, impacting at landing, drilling, pouring are primarily investigated; experimental activities include breadboarding to calibrate the numerical multiparticle models and resource extraction processes demonstrations with focus on thermochemical oxygen and water extraction; detailed design for a pilot plant for the moon is part of the on going ORACLE project.
- MBSE -CD space system lifecycle support: the group keeps enhancing the digital environment which supports the space mission\systems design and development as well as operational scenarios integrated disciplines simulations. In particular, from one side the team started adopting augmented reality to address and simplify AIV activities; on the other side successful exploitation of generative languages to support a fast and robust space missions lifecycle in both preliminary and AIV phases started to take benefit of the lesson learnt trapped in natural language written technical documents.
- Smallsats flight segments development: the team carries out activities for smallsats (cubesat class) flight segment design, development, AIV\AIT on board sw included. That offers the opportunity to run in orbit demonstration and validation of proposed new HW\SW architectures or techniques such as those in precise and rapid poiting strategies, visual base proximity navigation and AI flyaround guidance and control, ISL formation relative navigation, miniaturized planetary regolith manipulation. The benefits its clean room iso8 equipped to support all assembly and integration phases, functional testing included.
FACILITIES
- Dark room-light controlled: facility for image based algorithms developing and testing with HIL in relevant environment; equipped with: 4 blocks of tuneable led arrays; 6dof robotic arm; 2 VIS EM cameras, 1EM TIR camera; 1 2,4x2,4m calibrated lunar surface diorama for landing reproduction; 2 space debris high fidelity scaled mockups for flyaround and close proximity reproduction.
- IP avionic bench: EM bench for PIL/HIL testing of multispectral image processing: VIS\TIR EM cameras, EM on board processing boards (e.g.Xilinx Ultrascale+).
- RF avionic bench: dirty bench including multiple Adalm-PLUTOs, EM transceivers, zedboard, desktop for ISL testing.
- Planetary resources plant: certified lunar simulant bins, gas-chromatographer, 1200°C furnace, 250°C oven, -50°C condenser, fluximeters reactants lines and tanks. The in house built plant is exploited to characterize ISRU processes for water extraction.
- Frictionless table and robot: glass table equipped with a 5 dof vehicle under development for complete wireless support: 3 rotational dof frictionless platform active, equipped with 8 col gas thrusters and IMU. Available for very close proximity flying verification and low gravity experimental activities.
- Clean\dirty rooms: 12sqm ISO8 room, equipped for flight equipment\units assembly, integration and testing. Pre-room equipped with TMTC chain for space2ground operations.
- Ground station: 1 S band, 1 UHF/VHF ground station currently devoted to the HERMES fleet operations.
FUTURE PLANS
Continuation of the on going activities:
- Tool for rapid design of distributed architectures in non keplerian regimes
- Heterogeneous constellation design with operational perspective
- Distributed system GC in highly perturbed environment
- AI techniques (learning) for proximity guidance and control IP supported
- AI techniques for proximity navigation
- Pil-HIL settling and development for multispectral IP for near\far relative\absolute navigation, attitude determination\object shaping
- ISL-RF based algorithms to support relative NAV, VM\PIL\HIL
- Design of high accuracy attitude s\s
- Virtual modeling\experiments on non-cohesive planetary soils in support to design and operations of surface\flight space artifacts
- MBSE-AI (generative languages-VR-AR) supported development to enhance the space missions life cycles
- Smallsats flight segments development
- Digital twins and virtual PIL/HIL simulators tor development, validation and testing of autonomy and FDIR algorithms and SW
ONGOING MAIN PROJECTS
- CHIPS, ASI
- e.Inspector ESA (closed in 2024)
- HERMES TP/OPS, ASI
- Moonlight, ESA
- NIVES, ASI
- ORACLE, ASI
- TASTE, ASI
- VULCAIN, ESA
Journal Publications 2022-2024
- Pasquale, A., Silvestrini, S., Capannolo, A., Lunghi, P., Lavagna, M. Small bodies non-uniform gravity field on-board learning through Hopfield Neural Networks, 2022, Planetary and Space Science 212
- A.Colagrossi, M.Lavagna, Fault tolerant attitude and orbit determination system for small satellite platforms, Aerospace 9(2),46 2022, DOI: 10.3390/aerospace9020046
- A.Colagrossi, M.Lavagna, A Spacecraft Attitude Determination and Control Algorithm for Solar Arrays Pointing Leveraging Sun Angle and Angular Rates Measurements, 2022, Algorithms, 15(2),29
- M.Piccinin, P.Lunghi, M.Lavagna, Deep Reinforcement Learning-based policy for autonomous imaging planning of small celestial bodies mapping, Aerospace Science and Technology 120,107224,2022
- Guaita, M., Magarotto, M., Manente, M., Pavarin, D., Lavagna M. Semi-Analytical Model of a Helicon Plasma Thruster, 2022, EEE Transactions on Plasma Science
- Silvestrini, S., Piccinin, M., Zanotti, G., Brandonisio A.,.Lunghi, P., Lavagna, M.Implicit Extended Kalman Filter for Optical Terrain Relative Navigation Using Delayed Measurements Aerospace, 2022, 9(9), 503
- P.Lunghi, P.di Lizia. R.Armellin, M.Lavagna, Semi-analytical adaptive guidance computation for autonomous planetary landing, Acta Astronautica, Volume 195, June 2022, Pages 265-275
- Silvestrini, S., Piccinin, M., Zanotti, G., Lavagna, M., Varile, M., Optical navigation for Lunar landing based on Convolutional Neural Network crater detector Aerospace Science and Technology, 2022, 123, 107503
- Colombi, F., Colagrossi, A., Lavagna, M., Characterisation of 6DOF natural and controlled relative dynamics in cislunar space Acta Astronautica, 2022, 196, pp. 369–379
- Pasquale, A., Zanotti, G., Prinetto, J., Ceresoli, M., Lavagna, M., Cislunar distributed architectures for communication and navigation services of lunar assets, Acta Astronautica, 2022, 199, pp. 345–355
- Troisi, I., Lunghi, P., Lavagna, M., Oxygen extraction from lunar dry regolith: Thermodynamic numerical characterization of the carbothermal reduction Acta Astronautica, 2022, 199, pp. 113–124
- Silvestrini, S., Lavagna, M., Deep Learning and Artificial Neural Networks for Spacecraft Dynamics, Navigation and Control, Drones, 2022, 6(10), 270,DOI: 10.3390/drones6100270
- A.Capannolo, M. Lavagna, Adaptive State-Dependent Riccati Equation Control for Formation Reconfiguration in Cislunar Space, Journal of Guidance, Control, and Dynamics202245:5, pp. 982– 989, https://doi.org/10.2514/1.G006540
- L.Capra, A.Brandonisio, M.Lavagna, Network architecture and action space analysis for deep reinforcement learning towards spacecraft autonomous guidance, Advances in Space Research, Dec 2022, https://doi.org/10.1016/j.asr.2022.11.048
- Capannolo, Andrea; Lavagna, Michèle, Adaptive State-Dependent Riccati Equation Control for Formation Reconfiguration in Cislunar Space, JOURNAL OF GUIDANCE CONTROL AND DYNAMICS, 45-5, 2022
- A.Capannolo, G. Zanotti, M. Lavagna, G. Cataldo, Model Predictive Control for formation reconguration exploiting quasi-periodic tori in the cislunar environment, Nonlinear Dyn (2023). https://doi.org/10.1007/s11071-022-08214-8
- J.Prinetto, A.Colagrossi, I.Troisi, A. Dottori, M.Lavagna, Terrestrial demonstrator for a low- temperature carbothermal reduction process on lunar regolith simulant: Design and AIV activities, Planetary and Space Science, Volume 225, January 2023, 105618, https://doi.org/10.1016/j.pss.2022.105618
- M.Bechini, M.Lavagna, P.Lunghi, Dataset generation and validation for spacecraft pose estimation via monocular images processing, Acta Astronautica Volume 204, Pages 358 - 369March 2023, DOI:10.1016/j.actaastro.2023.01.012
- R.Marschall, N.Thomas, S.Ulamec, S.Hviid, S.Mottola, J.B. Vincent,F. Ferri, A. Herique, D.Plettemeier, Á.Kereszturi, M. Lavagna, J.Prinetto, A.Dottori, A. Falke,F. da Silva Pais Cabral, ORIGO: A mission concept to challenge planetesimal formation theories, Frontiers in Space Technology, 13 January 2023, DOI 10.3389/frspt.2022.1054360
- E.Dotto et al., The Dimorphos ejecta plume properties revealed by LICIACube, Nature 627(8004), pp. 505-509
- M.Bechini, G. Gu, P.Lunghi, M.Lavagna, Robust spacecraft relative pose estimation via CNN-aided line segments detection in monocular images, Acta Astronautica, 215, pp. 20-43
- Guadagnini, J., De Zaiacomo, G., Lavagna, M. Mission Performance Assessment of the Recovery and Vertical Landing of a Reusable Launch Vehicle, Aerospace 2024, 11(1), 35
- De Oliveira, A., Lavagna, M., Development of a Controlled Dynamics Simulator for Reusable Launcher Descent and Precise Landing, Aerospace 2023, 10(12), 993
- Deshapriya, J.D.P., et al, Characterization of the DART Impact Ejecta Plume on Dimorphos from LICIACube Observations, 2023 Planet. Sci. J. 4 231
- Zanotti, G., Ceresoli, M., Lavagna, M., Exploiting Lunar Navigation Constellation for GNC Enhancement in Landing Missions, Aerospace 2023, 10(10), 850
- Altieri, F., et al, Investigating the Oxia Planum subsurface with the ExoMars rover and drill, Advances in Space Research 71(11), 1 June 2023, Pages 4895-4903
- Quirino, M., Sciarrone, G., Piazzolla, R., Fiore, F., Lavagna, M., HERMES CubeSat Payload Thermal Balance Test and Comparison with Finite Volume Thermal Model, Applied Sciences (Switzerland) 13(9), 2023, 5452
- Cheng, A.F. et al, Momentum transfer from the DART mission kinetic impact on asteroid Dimorphos, Nature, 616(7957), 2023, pp. 457-460
- Colagrossi A, Bertacin R., Lavagna M., An Effective Sensor Architecture for Full-Attitude Determination in the HERMES Nano-Satellites, Sensors 23(5),2393
- Bechini, M., Lavagna, M., Lunghi, P., Dataset generation and validation for spacecraft pose estimation via monocular images processing, Acta Astronautica 204, pp. 358-369
- Belloni, E., Silvestrini, S., Prinetto, J., Lavagna, M., Relative and absolute on-board optimal formation acquisition and keeping for scientific activities in high-drag low-orbit environment, 2023 Advances in Space Research
- Capannolo, A., Zanotti, G., Lavagna, M., Cataldo, G., Formation flying orbits and GNC design in binary asteroid systems, Advances in Space Research
- Brandonisio, A., Capra, L., Lavagna, M., Deep reinforcement learning spacecraft guidance with state uncertainty for autonomous shape reconstruction of uncooperative target, 2023 Advances in Space Research
- Zanotti, G., Ceresoli, M., Pasquale, A., Prinetto, J., Lavagna, M., High performance lunar constellation for navigation services to Moon orbiting users, 2023 Advances in Space Research
- Civardi, G.L., Bechini, M., Quirino, M., (...), Piccinin, M., Lavagna, M., Generation of fused visible and thermal-infrared images for uncooperative spacecraft proximity navigation, 2023 Advances in Space Research
- Quirino M., Lavagna M., Spacecraft and Asteroid Thermal Image Generation for Proximity Navigation and Detection Scenarios, Applied Sciences (Switzerland), 2024, 14(13), 5377
- Barberi Spirito D., Prinetto J., Capannolo A., Lavagna M, Data Relay Constellation for high- performance links supply to future Martian missions, Advances in Space Research, 2024, 73(11), pp. 5696–5713
- Brandonisio, A., Bechini, M., Civardi, G.L., Capra, L., Lavagna, M., Closed-loop AI-aided image- based GNC for autonomous inspection of uncooperative space objects, Aerospace Science and Technology, 2024, 155, 109700
- Mazzotti, M., Sargeant, H.M., Barco, A., ... Ambrosi, R., Lavagna, M., Ice-mining lunar rover using Americium-241 radioisotope power systems, Acta Astronautica, 2024, 225, pp. 801–811
- Mazzotti, M., Sargeant, H.M., Barco, A., ... Ambrosi, R., Lavagna, M., Ice-mining lunar rover using Americium-241 radioisotope power systems, Acta Astronautica, 2024, 225, pp. 801–811
- Colagrossi, A., Integrated Magnetic Management of Stored Angular Momentum in Autonomous Attitude Control Systems. AerospaceThis link is disabled., 2023, 10(2), 103
Progetti di ricerca
H2020 | HERMES-SP - High Energy Rapid Modular Ensemble of Satellites, Scientific Pathfinder
Scopri di piùH2020 | ASCenSIon - Advancing Space Access Capabilities - Reusability and Multiple Satellite Injection
Scopri di piùASI | INNOVATIVE RESEARCH ACTIVITY - Advanced Materials for Space Applications
Scopri di piùH2020 | S3NET - Satellite Swarm Sensor NETwork
Scopri di piùASI | NIVES: Near-Earth Interplanetary Voyage for asteroid Exploration and Survey
Scopri di piùESA - VULCAIN Ph A e B - Sviluppo di missione in volo coordinato per osservazione della terra mediante nanosatelliti
Scopri di piùASI | GLASS - Guide di Luce per Applicazioni multifunzionali per Sistemi Spaziali
Scopri di piùASI | ORACLE - Oxygen Retrieval Asset by Carbothermal-reduction in Lunar Environment
Scopri di piùASI | CHIPS - CubeSat with HIgh Performance for Skyhopper
Scopri di più
Articoli del magazine
31/03/2026
MICHÈLE LAVAGNA AL TGR LEONARDO

20/03/2026
FLIGHT DYNAMICS OPERATIONS FOR ESA’S DEEP SPACE MISSIONS

03/11/2025
ASIMOV: UN "AUTOPILOTA SPAZIALE" PER LA SICUREZZA ORBITALE
19/09/2025
FESTIVAL INTERNAZIONALE DELL’INGEGNERIA 2025
23/05/2025
POLIMI TAKES PART AT ESA CONCURRENT ENGINEERING CHALLENGE 2025

05/05/2025
STEFANO SILVESTRINI RACCONTA LA SUA RICERCA SU FRONTIERE
18/03/2025
NEW PHD POSITION ON MOON EXPLORATION
17/03/2025
UNA PICCOLA COSTELLAZIONE DI CUBESAT PER UNA GRANDE SCIENZA
15/03/2025
OPEN REGISTRATION - EUROPEAN SPACE AGENCY - CONCURRENT ENGINEERING CHALLENGE

30/01/2025
Il DAER @FOCUS TV

31/05/2020
IL LANCIO DELLA CREW DRAGON DI SPACE X

31/07/2018
HERMES@H2020: COSTELLAZIONE DI NANOSATELLITI PER L’ASTROFISICA MULTI-MESSAGGERA
